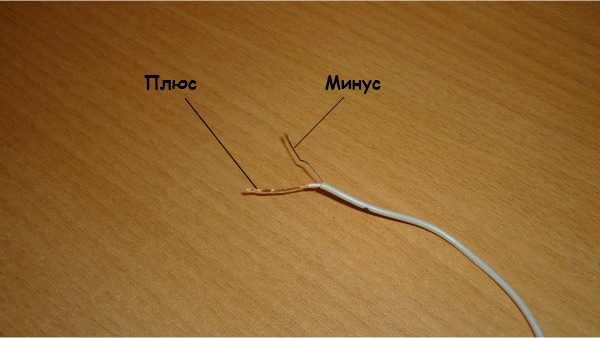
Как определить тип двигателя синхронный или асинхронный
Содержание:
- Подключение асинхронного двигателя
- Статор асинхронного двигателя
- Система трехфазного тока
- Электродвигатели переменного тока
- Синхронный и асинхронный генератор
- Пуск синхронного двигателя
- Два вида электродвигателей переменного тока
- Строение синхронного двигателя
- Способы пуска
- Плюсы и минусы синхронных альтернаторов
- Запуск электродвигателей
- Принцип действия и устройство электромашин разных типов
Подключение асинхронного двигателя
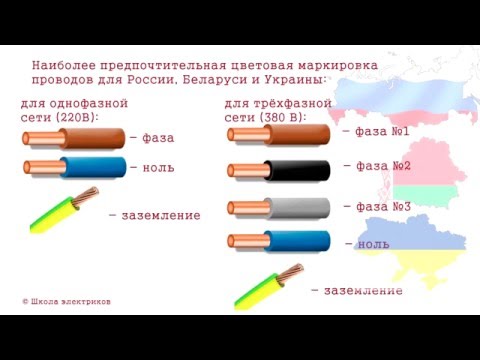
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
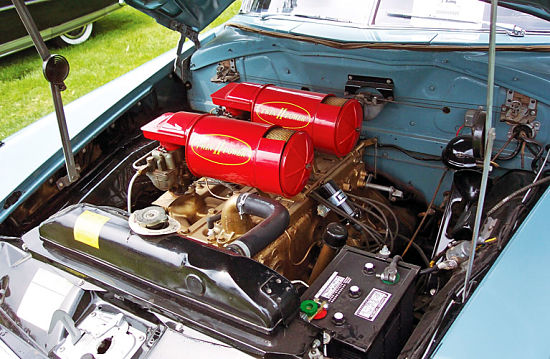
Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.
Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы
в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
Асинхронный двигатель имеет три “куска” медного провода
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Реальное фото статора одного из асинхронного двигателя выглядит вот так.
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
п =т =
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
(рОбмотка с двумя парами полюсов на каждую ветвь
am = 360° · (1/mp) = 60°.
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
dsiaeiam.aei=p—am.aeiτp
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
Синхронный и асинхронный генератор
Синхронный генератор конструктивно сложнее, например, у него на роторе находятся катушки индуктивности. Асинхронный генератор устроен гораздо проще — его ротор напоминает обычный маховик. Как следствие, среднестатистический асинхронный генератор лучше защищен от попадания влаги и грязи (говорят что он имеет закрытую конструкцию) и тут самое время вспомнить о классе защиты. Он обозначается двумя буквами (IP) и двумя цифрами. Первая цифра означает:
«2» защита от касания пальцами и от проникновения твердых посторонних частиц диаметром более 12 мм; «4» защита от касания инструментом пальцами или проволокой диаметром более 1 мм, защита от проникновения твердых посторонних частиц диаметром более 1 мм; «5» полная защита от касания вспомогательными средствами любого типа и от проникновения пыли. Вторая цифра: «3» защита от струй воды падающих под углом до 60 градусов от вертикали; «4» защита от струй воды падающих под любым углом;
Самый основной недостаток синхронного генератора — низкая степень защиты от внешних воздействий таких как: пыль, грязь, вода, т.к. синхронный генератор охлаждается «протягивая» через себя воздух, соответственно все что находится в воздухе может попадать в генератор. — для трёхфазных синхронных генераторов допустимый перекос фаз 33% — коэффициент нелинейных искажений 13-25% IP23 и 3-10% IP54 (в зависимости от производителя)
Синхронные генераторы, как правило, соответствуют классу IP 23, тогда как асинхронные IP 54. Впрочем, в последнее время практически у всех ведущих производителей появились инновационные синхронные агрегаты удовлетворяющие IP 54.
К сожалению асинхронники тоже не лишены недостатков. Способность «проглатывать» пусковые перегрузки ниже, чем у синхронных генераторов.
Асинхронный генератор (IP54) вообще не имеет обмоток на роторе. Для возбуждения ЭДС в его выходной цепи используют остаточную намагниченность якоря. Конструктивно такой альтернатор намного проще, надежнее и долговечнее. Кроме того, поскольку обмотки ротора охлаждать не нужно (их просто нет), корпус асинхронного генератора полностью закрыт, что позволяет исключить попадание пыли и влаги. Асинхронные генераторы не восприимчивы к коротким замыканиям, поэтому лучше подходят для питания сварочных аппаратов. — для трёхфазных асинхронных генераторов допустимый перекос фаз 60-70% — коэффициент нелинейных искажений 2-3%
Синхронные и асинхронные генераторы отличаются своими возможностями. Мнения специалистов тут расходятся (каждый естественно хвалит своё оборудование), но в среднем, всё выглядит примерно следующим образом: — синхронные альтернаторы легче переносят пусковые перегрузки и вырабатывают более чистый ток; — в силу простоты конструкции, асинхронные альтернаторы более устойчивы к короткому замыканию, поэтому лучше подходят для питания сварочных аппаратов.
Впрочем, в настоящее время существует множество способов улучшить выходные параметры мини электростанций. В частности, асинхронный генератор, оборудованный стартовым усилителем, способен справиться с пусковыми перегрузками, а качество выдаваемого электричества может быть повышено подключением AVR (автоматического регулятора напряжения). Кстати, на стабильность напряжения оказывает влияние и класс двигателя, а именно его способность поддерживать постоянные обороты (как правило, 3000) при изменениях нагрузки.
Синхронные генераторы обеспечивают поддержание напряжения в сети с высокой точностью (колебания в пределах 5%), поэтому позволяют подключать к ним аппаратуру чувствительную к перепадам напряжения, например, компьютеры, телевизоры и другие электронные устройства. Кроме того, такие генераторы без проблем справляются с энергоснабжением электроинструментов и электродвигателей, с реактивной нагрузкой до 65% от своего номинала.
Асинхронные генераторы менее точны: они поддерживают напряжение постоянным с точностью 10%, поэтому их нельзя применять для питания высокоточной аппаратуры (Hi-Fi техники и пр.). Подобные генераторы позволяют подключать к ним электроинструменты и электродвигатели с реактивной мощностью до 30% от номинала.
Наконец в качестве конструктивного исполнения более предпочтительны генераторы не оборудованные щетками (так называемые brush-less бесщеточные), так как они не требуют обслуживания и не создают помех.
Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
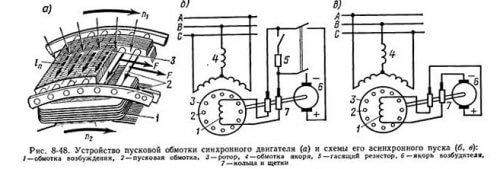
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
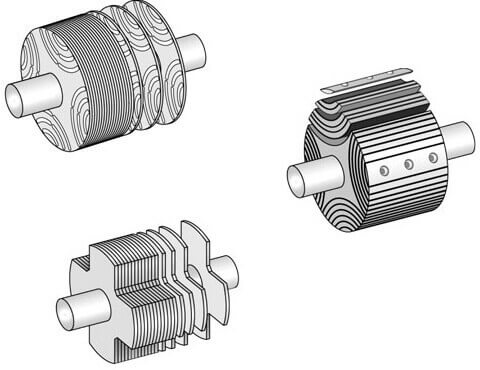
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
Асинхронные двигатели
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
Устройство двигателя
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
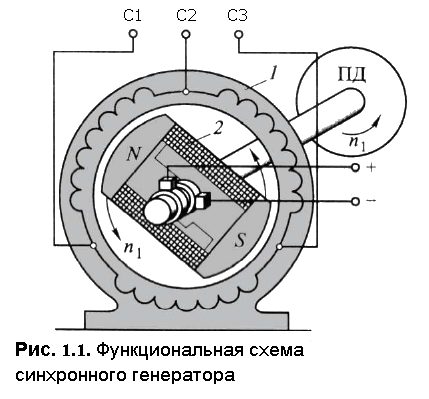
Синхронный электродвигатель (или генератор)
1 – ротор, 2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
https://youtube.com/watch?v=SLf6AOt9-Us
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
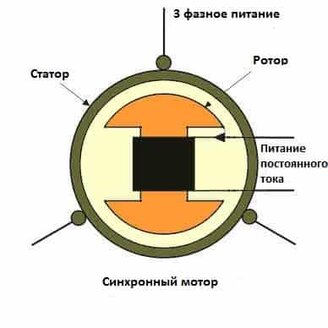
Строение синхронного двигателя
Его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
 Строение синхронного двигателя
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
//www.youtube.com/embed/5k3sXBMBKEw?feature=player_detailpage
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки. При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
- Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора. Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Источник
Плюсы и минусы синхронных альтернаторов
Качественные СА должны комплектоваться медной, а не слабой алюминиевой обмоткой (будьте внимательны: некоторые производители таким образом пытаются снизить расходы на производство). Именно качественная обмотка и щеточный механизм обеспечивают равномерность тока на выходе (с отклонением не более 5 %), позволяют легко переносить повышенные нагрузки при запуске и непродолжительные колебания напряжения.
Чистый электроток очень важен для таких высокочувствительных пользователей, как ноутбуки, компьютеры, принтеры, телефоны, лабораторное и медицинское оборудование. И даже для такой привычной бытовой техники, как холодильники, ТВ, стиральные машинки также предпочтительным будет электроток, вырабатываемый синхронным генератором. Кроме того, только к щеточным ИБП можно подключать АВР (автоматический ввод резерва).
Итак, к неоспоримым плюсам щеточного узла и медной обмотки СА отнесем:
- стабильность напряжения;
- качественный электроток;
- надежность в работе.
При этом постоянное движение щеток способствует чрезмерному нагреву генератора. Применяющаяся в СА воздушная система охлаждения с вентилятором в целом достаточно надежна, но имеет существенный недостаток – эффект пылесоса. Активное втягивание вовнутрь пыли, грязи, влаги часто становится причиной неполадок в системе.
Но прогресс не стоит на месте, и сегодня ведущие производители находят все новые способы защиты оборудования от внешних факторов.
Выбирая генератор, обязательно интересуйтесь, к какому классу защиты он относится.
Минусы щеточных альтернаторов:
- попадание пыли и влаги;
- необходимость периодического техосмотра и замены щеток;
- высокая стоимость;
- создание помех для радиоволн.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор . В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке. Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.