Синхронные и асинхронные двигатели, их отличия и разница в применении. отличие синхронного от асинхронного двигателя
Содержание:
- Два вида электродвигателей переменного тока
- Применение
- Принцип работы синхронного двигателя
- Синхронные двигатели: устройство и принцип действия
- Синхронный двигатель (СД)
- Режимы работы
- Возбуждение синхронной машины
- Способы пуска
- Запуск установки
- Синхронные машины высокой мощности – конструктивные особенности
- Асинхронный электродвигатель
- Область применения
- Синхронный генератор. Принцип действия
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может. Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции. А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
Асинхронные двигатели
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать. Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре. Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
Устройство двигателя
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
Синхронный электродвигатель (или генератор)
1 – ротор, 2 – коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону». В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора. А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
https://youtube.com/watch?v=SLf6AOt9-Us
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Синхронный двигатель (СД)
Синхронный двигатель — агрегат с индивидуальной конструкцией ротора и индуктором с постоянными магнитами. Отличается улучшенными характеристиками мощности, момента и инерции. Имеет ряд особенностей конструкции и принципе действия.
Устройство
Конструктивно состоит из двух элементов: ротора (вращается) и статора (фиксированный механизм). Роторный узел находится во внутренней части статора, но бывают конструкции, когда ротор расположен поверх статора.
В состав ротора входят постоянные магниты, отличающиеся повышенной коэрцитивной силой.
Конструктивно СД делятся на два типа по полюсам:
- Неявно выраженные. Отличаются одинаковой индуктивностью по поперечной и продольной оси.
- Явно выраженные. Поперечная и продольная индуктивность имеют разные параметры.
Конструктивно роторы бывают разными устройством и по конструкции.
В частности, магниты бывают:
- Наружной установки.
- Встроенные.
Статор условно состоит из двух компонентов:
- Кожух.
- Сердечник с проводами.
Обмотка статорного механизма бывает двух видов:
- Распределенная. Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.
- Сосредоточенная. В ней количество пазов на полюс и фазу всего одно, а сами пазы распределяются равномерно по поверхности статорной части. Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно. Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
Форма электродвижущей силы электрического синхронного мотора бывает в виде:
- Трапеции. Характерна для устройств с явно выраженным полюсом.
- Синусоиды. Формируется за счет скоса наконечников на полюсах.
Если говорить в целом, синхронный мотор состоит из следующих элементов:
- узел с подшипниками;
- сердечник;
- втулка;
- магниты;
- якорь с обмоткой;
- втулка;
- «тарелка» из стали.
Принцип работы
Сначала к обмоткам возбуждения подводится ток постоянно величины. Он создает магнитное поле в роторной части. Статор устройства содержит обмотку для создания магнитного поля.
Как только на статорную обмотку подается ток переменной величины, по закону Ампера создается крутящий момент, и ротор начинает вращаться с частотой, равной частоте тока в статорном узле. При этом оба параметра идентичны, поэтому и двигатель носит название синхронный.
Роторная ЭДС формируется, благодаря независимому источнику питания, что позволяет менять обороты и не привязываться к мощности подключенных потребителей.
С учетом особенностей работы синхронный электродвигатель не может запуститься самостоятельно при подключении к трехфазному источнику тока.
Сфера применения
Электродвигатель синхронного типа имеет широкую сферу применения, благодаря постоянству частоты вращения.
Эта особенность расширяет сферу его применения:
- энергетика: источники реактивной мощности для поддержания напряжения, сохранение устойчивости сети при аварийных просадках;
- машиностроение, к примеру, при изготовлении гильотинных ножниц с большими ударными нагрузками;
- прочие направления — вращение мощных компрессоров или вентиляторов, генераторы на электростанциях, обеспечение устойчивой работы насосного оборудования и т. д.
Как подключить электродвигатель 380В на 220В
Преимущества и недостатки
После рассмотрения конструктивных особенностей, принципа работы и сферы применения СД подведем итог по положительным / отрицательным особенностям.
Плюсы:
- Возможность работы при косинусе Фи равном единице (отношение полезной мощности к полной). Эта особенность улучшает косинус Фи сети. При работе с опережающим током синхронные машины генерируют реактивную мощность, которая поступает к асинхронным моторам и уменьшает потребление «реактива» от генераторов электрических станций.
- Высокий КПД, достигающий 97-98%.
- Повышенная надежность, объясняемая большим воздушным зазором.
- Доступность регулирования перегрузочных характеристик, благодаря изменению тока, подаваемого в ротор.
- Низкая чувствительность к изменению напряжения в сети.
Минусы:
- Более сложная конструкция и, соответственно, высокая стоимость изготовления.
- Трудности с пуском, ведь эля этого нужные специальные устройства: возбудитель, выпрямитель.
- Потребность в источнике постоянного тока.
- Применение только для механизмов, которым не нужно менять частоту вращения.
Пример СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В.
СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.

Возбуждение синхронной машины
Для питания обмотки возбуждения предусмотрено наличие возбудителя, в его качестве выступает генератор постоянного тока, якорь которого сопряжен с валом машины, посредством использования механического устройства.
По способу возбуждения синхронные машины подразделяются на два типа:
- Возбуждение независимого вида.
- Самовозбуждение.
При независимом возбуждении схема подразумевает наличие подвозбудителя, который питает: обмотку главного возбудителя, реостат для регулировки, устройства управления, регуляторы напряжения и т. д. Кроме этого способа, возбуждение может осуществляться от генератора, выполняющего вспомогательную функцию, он приводится в работу от двигателя синхронного или асинхронного типа.
Для самовозбуждения, питание обмотки происходит через выпрямитель, работающий на полупроводниках или ионного типа.
Для турбо- и гидрогенераторов используют тиристорные устройства возбуждения. Ток возбуждения регулируется в автоматическом режиме при помощи регулятора возбуждения. Для синхронных машин малой мощности характерно использование регулировочных реостатов, они включены в цепь обмотки возбуждения.
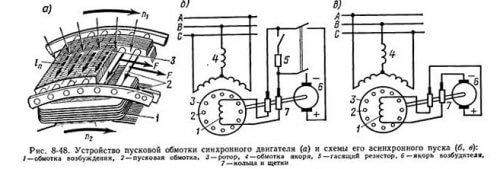
Способы пуска
За счет значительной инерции ротора он не способен сдвинуться под нагрузкой полем статора. В случае подачи рабочего напряжения не удастся получить устойчивую магнитную связь и вращение не начнется. Для решения этой задачи применяются способы запуска ротора до определенной скорости вращения. Как правило, это то число оборотов, которое приближается к значению в режиме синхронной работы.
Среди наиболее распространенных способов приведения синхронного двигателя в движение можно выделить:
- Асинхронный пуск – этот способ обеспечивается путем введения в конструкцию ротора стальных элементов в форме беличьей клетки. При подаче напряжения в клетке наводится ЭДС и возникает магнитное взаимодействие. Основным недостатком данного способа являются большие пусковые токи, в разы превышающие номинальный режим синхронного двигателя. Поэтому в схеме запуска используются реакторы или автотрансформаторы для снижения негативного воздействия.
- Частотный пуск – обеспечивается посредством частотных преобразователей. Которые снижают частоту питающего напряжения на рабочих обмотках. Это позволяет замедлить скорость вращения магнитного поля синхронного двигателя. Благодаря чему начинается вращение ротора.
- Двигательный пуск – для начала движения вал синхронного агрегата подсоединяется к разгонному двигателю. На этапе старта вращение обеспечивается от приводной электрической машины. Как только основной двигатель выйдет на подсинхронную скорость, разгонный агрегат выводится из работы.
Для каждого из способов используются соответствующие схемы и оборудование, позволяющие оптимизировать режим работы. Поэтому далее рассмотрим несколько характерных примеров для каждого способа запуска.
Асинхронный пуск
В этом способе используются синхронные двигатели специального типа, но скорость нарастания тока и его величину в рабочих обмотках принудительно снижают. Для этого устанавливаются реакторы или автотрансформаторы.
Как видите на схеме, в цепь питания каждой фазной обмотки синхронного двигателя устанавливается реактор. При включении контактора К2 напряжение подается на обмотки ток в реакторе не может вырасти скачкообразно. Поэтому пуск электродвигателя получается более плавным, чем в случае прямого включения. При разгоне электрической машины до подсинхронной скорости шунтирующий выключатель К1 выводит индуктивный элемент из цепи и агрегат работает в штатном режиме.
В данной схеме происходит автоматическое снижение напряжения на рабочих обмотках синхронного двигателя за счет автотрансформатора. Регулятор Р3 плавно повышает разность потенциалов до установившейся величины, ток при этом пропорционально нарастает. После достижения номинального момента, выключатель К1 зашунтирует автотрансформатор. Этот способ позволяет снижать пусковые токи со значительно большим усилием, чем в случае применения реакторов.
Частотный пуск
Основой современного частотного пуска являются схемы на полупроводниковых элементах, как правило, тиристорных преобразователях. Такие устройства снижают частоту изменения кривой напряжения, но практически не нарушают действующее значение.
Такой способ запуска сокращает время на разгон синхронного двигателя и снижает значение токовой нагрузки в момент пуска. Однако, современная схема частотного пуска имеет куда более сложную реализацию:
Двигательный пуск
Способ двигательного запуска предусматривает одновременную установку на один вал и синхронного, и разгонного двигателя. Старт вращения обеспечивает асинхронный разгонный электродвигатель, который легко набирает обороты под нагрузкой. Синхронный агрегат включается в работу при достижении подсинхронной скорости вращения.
Однако существенным недостатком такого способа является длительный промежуток времени от старта до момента вхождения электрической машины в синхронизм.
Источник
Запуск установки
 При использовании синхронных двигателей возникает масса трудностей на этапе их запуска. Из-за этого они не пользуются особой популярностью и уступают асинхронным вариантам.
При использовании синхронных двигателей возникает масса трудностей на этапе их запуска. Из-за этого они не пользуются особой популярностью и уступают асинхронным вариантам.
С момента появления на рынке работа синхронных агрегатов обеспечивалась специальным асинхронником, который механически соединялся с остальными узлами. По сути, ротор разгонялся до нужной частоты с помощью второго типа моторов. Современные асинхронники не нуждаются в подключении дополнительных механизмов, и все, что требуется для их работы, — соответствующее напряжение для статорной обмотки.

Как только система обеспечит нужную скорость вращения, разгонный двигатель будет отключен. При этом магнитные поля из электрического мотора выведут его на работу в синхронном режиме. Чтобы разогнать установку, придется задействовать еще один мотор мощностью 10% от мощности синхронного двигателя. При разгоне электродвигателя на 1 кВт используют разгонную систему мощностью 100 Вт. Как утверждают специалисты, таких показателей вполне хватает для сбалансированной работы машины в холостом режиме или с небольшой нагрузкой.
Синхронные машины высокой мощности – конструктивные особенности
Ввиду использования значительной величины мощности, синхронная установка подвергается значительному механическому воздействию, а также электромагнитной нагрузке, вследствие чего происходит существенный нагрев различных частей машин, для чего необходимо выполнить интенсивное охлаждение машины. Чтобы сохранить определенные габаритные размеры, для получения необходимого значения мощности, выполняют машины с различными особенностями, диктующими подразделение машин на несколько типов, это: турбогенераторы, гидрогенераторы, дизель-генераторы, синхронные компенсаторы, синхронные двигатели.
Турбогенераторы
Конструкция машины исполнена с горизонтальной осью и работает за счет использования турбины, ротор обязательно неявнополюсного исполнения. Скорость вращения вала отличается максимально возможным числом оборотов вращения и составляет 3000 об/мин.
За счет того, что в машине всего два полюса, ее конструктивная часть отличается уменьшенными габаритами и весом. При использовании такого агрегата на АЭС, применяют машины с количеством оборотов вала 1500 об/мин, с 4 полюсами, диаметр ротора меньше длины его активной части. Система, используемая для охлаждения, применяет поверхностный и косвенный принудительный обдув, иногда применяют косвенное водородное или водяное и масляное охлаждение.
Гидрогенераторы
Функционирование гидрогенератора осуществляется при использовании гидравлической турбины, обладающей невысоким количеством оборотов вала от 50 до 500 об/мин. Ротор явнополюсного исполнения отличается наличием большого числа пар полюсов. Его диаметр для некоторых типов гидрогенераторов может доходить до 16 м., тогда как длина составляет всего 1,75 м. Его мощность достигает 640 МВ*А.
Вал может располагаться вертикально. Гидрогенератор и турбина объединены одним валом ротора, также на нем может быть установлен возбудитель, подвозбудитель и синхронный генератор, который осуществляет питание электрических двигателей, предназначенных для регулировки турбины. Главное усилие в машине приходится на опорный подшипник, он способен выдержать вес роторов всего оборудования, динамические усилия и давление воды, приложенное к турбинным лопастям. Система охлаждения в устройствах этого типа выполняется с помощью омывания капсулы, в которую заключены объединенные одним валом элементы синхронного агрегата.
Синхронный компенсатор
Машина генерирует реактивную мощность и работает в двигательном режиме холостого хода, использующего активную сетевую нагрузку. Конструкция явнополюсного исполнения обычно присутствует до восьми пар полюсов. Ротор изготовлен облегченным, так как на валу отсутствует какая-либо нагрузка. Часто используется герметизированная конструкция машины, без вывода наружу вала компенсатора, система охлаждения работает за счет использования водорода, закаченного при большом давлении, внутрь.
Дизель-генератор
Машина имеет в своей конструкции явнополюсный ротор и подразумевает горизонтальную установку вала. Особенность – использование одного опорного подшипника, в качестве второй опоры используется подшипник вала генератора. На едином с ними валу установлен возбудитель.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Асинхронный электродвигатель
Асинхронный электродвигатель — основной привод, используемый в промышленности. К примеру, в автомобилестроении он используется в электроусилителях рулевого управления и в гибридных автомобилях. В следующем разделе представлена концепция работы асинхронного двигателя как индукционной машины. Приведен также энергетический анализ асинхронного двигателя в силу его явного преобладания среди приводов.
Устройство асинхронного электродвигателя
Различают двигатели с внешним ротором и внутренним ротором. У двигателей с внешним ротором статор находится внутри ротора, у двигателей с внутренним ротором наоборот — ротор находится внутри статора. На принципиальной схеме (рис. «Принцип работы асинхронного двигателя» ) показана принципиальная схема асинхронного двигателя с внутренним ротором.
Ротор состоит из короткозамкнутого каркаса с пакетом пластин (рис. «Короткозамкнутая клетка асинхронного электродвигателя» ), в качестве примера с четырьмя короткозамкнутыми стержнями). Пакет пластин полностью заполняет пространство короткозамкнутого каркаса (на рис. не показано). Он состоит из отдельных стальных листов, изолированных друг от друга, чтобы свести к минимуму потери вихревых токов.
Рабочие характеристики асинхронного электродвигателя
Обмотка статора создает вращающееся поле с трехфазным переменным током. Между скоростью вращающегося поля и скоростью ротора возникает разница, создающая индукцию магнитно-эффективного тока в роторе, которая в свою очередь способствует созданию крутящего момента.
Двухполосный короткозамкнутый ротор(osВЕ с
ΦEds = -d/dt∫∫BEdA (уравнение 12)
На основании этого уравнения и конструктивных переменных двигателя (см. рис. 13) получаем:
2E (l+2r) п = 2lr·ВЕ·ω sin(ωt) (уравнение 13)
где:
Е = I · Аnom/к (к — удельная электропроводность), напряжение создает магнитноэффективную мощность
i = (к·Аnomlr·ωs/(l+r))·sin(ωst) (уравнение 14)
в проводящем контуре, магнитное поле которого
Hind = i·N/lFe
и плотность потока (магнитная индукция)
Bind = μ·Hind
ослабляет исходное вращающееся поле ВЕ (индуктивное сопротивление). Нижеследующее уравнение применимо для получения результирующей магнитной индукции:
BR= BE-Bind
В уравнении Максвелла (уравнение 13) вместо ВЕ остается результирующая магнитная индукция BR. На проводящий контур воздействует тангенциальная сила Ft:
Ft = i l BR sin(ωst) (уравнение 15)
(сила Лоренца). Она используется для вычисления крутящего момента. Для уравнений 14 и 15 справедливо следующее:
M=2 Ft r = (2 k·Anom ωs/(l+r))·(lr·BR sin(ωst))2
Распределение крутящего момента асинхронного двигателя
При увеличении угловой частоты индуктивное сопротивление сначала приводит к увеличению крутящего момента вплоть до достижения переломного момента. Это максимально возможный крутящий момент двигателя. Впоследствии он падает из-за увеличивающегося влияния индуктивного сопротивления. Рассеяние мощности Рv, возникающее в проводящем контуре, вычисляется на основе сопротивления проводящего контура Rs и тока, наведенного в контуре is
Pv = Rs— is2
Таким образом, рассеяние мощности растет пропорционально квадрату наведенного тока.
Классы эффективности двигателей
СЕМЕР Европейский Комитет изготовителей электродвигателей и силовой электроники) ввел классификацию эффективности на базе трех классов (EFF1, EFF2 и EFF3). Классы эффективности применяются к трехфазным асинхронным двигателям с двумя и четырьмя полюсами, а также с выходной мощностью от 1,1 до 90 кВт (рис. «Эффективность и выходная мощность» ).
Область применения
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
- — стабильностью частоты вращения как при колебании напряжения в питающей электросети, так и при изменении величины механической нагрузки на валу;
- — возможностью работы с очень высоким коэффициентом мощности — вплоть до единицы.
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков. Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи.При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля.Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети.Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
Источник
Синхронный генератор. Принцип действия
Отличительным признаком синхронного генератора является жёсткая связь между частотой f переменной ЭДС, наведённой в обмотке
статора, и частотой вращения ротора n , называемой синхронной частотой вращения:
n = f / p
где p – число пар полюсов обмотки статора и ротора.
Обычно частота вращения выражается в об/мин, а частота ЭДС в Герцах (1/сек), тогда для количества оборотов в минуту формула примет вид:
n = 60·f / p
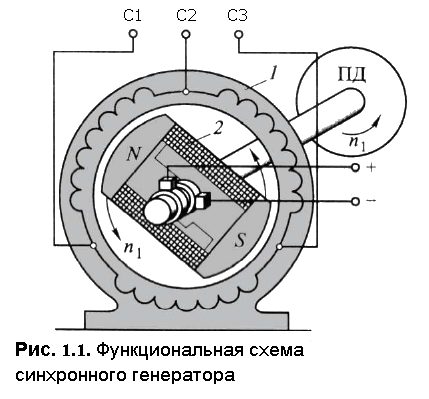
Приводным двигателем (ПД), в качестве которого используется турбина, двигатель внутреннего сгорания либо другой источник механической энергии, ротор генератора приводится во вращение с синхронной скоростью. При этом магнитное поле электромагнита ротора также вращается с синхронной скоростью и индуцирует в трёхфазной обмотке статора переменные ЭДС EA , EB и EC , которые будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на 1/3 периода (120°), образуют симметричную трёхфазную систему ЭДС.
C подключением нагрузки к зажимам обмотки статора С1, С2 и С3 в фазах обмотки статора появляются токиIA, IB, IC , которые создают вращающееся магнитное поле. Частота вращения этого поля равна частоте вращения ротора генератора. Таким образом, в синхронном генераторе магнитное поле статора и ротор вращаются синхронно. Мгновенное значение ЭДС обмотки статора в рассматриваемом синхронном генераторе
e = 2Blwv = 2πBlwDn
Здесь:B – магнитная индукция в воздушном зазоре между сердечником статора и полюсами ротора, Тл;l – активная длина одной пазовой стороны обмотки статора, т.е. длина сердечника статора, м;w – количество витков;v = πDn – линейная скорость движения полюсов ротора относительно статора, м/с;D – внутренний диаметр сердечника статора, м.
Формула ЭДС показывает, что при неизменной частоте вращения ротора n форма графика переменной ЭДС обмотки якоря (ста-
тора) определяется исключительно законом распределения магнитной индукции B в зазоре между статором и полюсами ротора. Если график магнитной индукции в зазоре представляет собой синусоиду B = Bmax sinα , то ЭДС генератора также будет синусоидальной. В
синхронных машинах всегда стремятся получить распределение индукции в зазоре как можно ближе к синусоидальному.
Так, если воздушный зазор δ постоянен (рис. 1.2), то магнитная индукция B в воздушном зазоре распределяется по трапецеидальному закону (график 1). Если же края полюсов ротора «скосить» так, чтобы зазор на краях полюсных наконечников был равен δmax (как это показано на рис. 1.2), то график распределения магнитной индукции в зазоре приблизится к синусоиде (график 2), а, следовательно, и график ЭДС, индуцированной в обмотке генератора, приблизится к синусоиде.
Частота ЭДС синхронного генератора f (Гц) пропорциональна синхронной частоте вращения ротора n (об/с)
f = pn
где p – число пар полюсов.
В рассматриваемом генераторе (см. рис.1.1) два полюса, т.е. p = 1.
Для получения ЭДС промышленной частоты (50 Гц) в таком генераторе ротор необходимо вращать с частотой n = 50 об/с (n = 3000 об/мин).